[
next
] [
prev
] [
prev-tail
] [
tail
] [
up
]
30.9
Estimaci
ón hacia delante, hacia detr
ás y bi-direccional
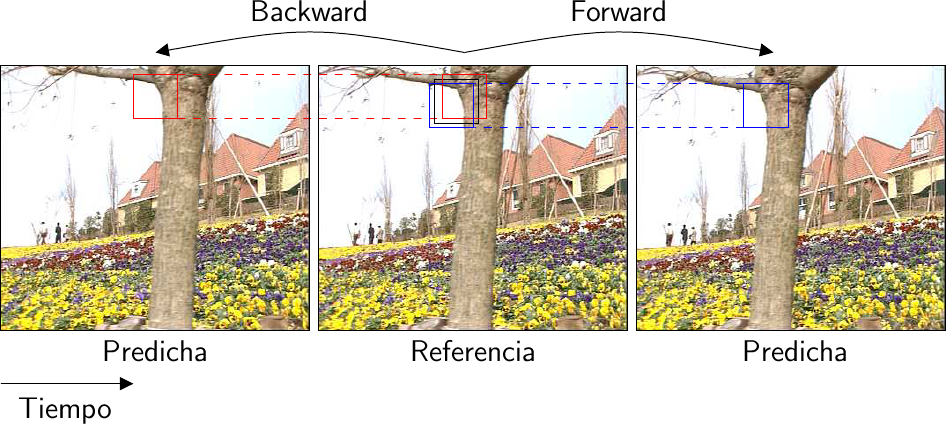
Dependiendo de la posici
ón relativa (en el tiempo) de la(s) im
ágen(es) de referencia
y de la imagen predicha, hablaremos de:
Predicci
ón hacia delante (forward):
cuando la imagen de referencia
es anterior a la imagen predicha.
Predicci
ón hacia detr
ás (backward):
cuando la imagen de referencia
es posterior a la imagen predicha.
Predicci
ón bi-direccional (bi-directional):
cuando la imagen predicha
est
á entre dos im
ágenes de referencia.
[
next
] [
prev
] [
prev-tail
] [
front
] [
up
]